
In This Article
- 01The Moment Robots Went Mainstream
- 02What Makes a Humanoid Robot Move?
- 03Why Radial Multi-pole Ring Magnets Are the Standard
- 04The Scale of Demand: From Gala Stunts to Mass Production
- 05What Grade of Magnets Do Humanoid Robots Use?
- 06What Has Changed Since the 2026 Gala: NdPr Prices and Export Licensing
- 07Beyond the Gala: What This Means for the Industry
- 08How Mainrich Supports the Humanoid Robotics Supply Chain
- FAQFrequently Asked Questions
Key Takeaways
- ◆Unitree's H1 carries roughly 10 high-torque joint motors per unit; the more articulated H1-2 has 27 degrees of freedom — every actuator depends on a precision sintered NdFeB ring.
- ◆The dominant joint-motor specification across Chinese humanoids (Unitree, Fourier GR-1, UBtech Walker S, AgiBot) is a radial multi-pole sintered ring in N45SH or N48SH grade with GBD processing.
- ◆Radial multi-pole rings deliver 2–5% torque ripple versus 8–15% for segmented arc assemblies — the difference between fluid choreography and visible jitter.
- ◆Joint-motor internal temperatures reach 100–130°C under sustained walking and load-bearing duty; N42SH is the floor grade, N45SH–N48SH is the working standard.
- ◆NdPr feedstock prices reached approximately USD 126/kg in early April 2026, a ~2.4x jump from January 2026 levels — magnet quotes from Q4 2025 are no longer valid for any new program.
- ◆Goldman Sachs projects the humanoid robot market at USD 38 billion by 2035; magnet supply qualification is increasingly the binding constraint on production ramp.
The Moment Robots Went Mainstream
On January 28, 2025, over 700 million viewers watched CCTV's Spring Festival Gala - the most-watched annual broadcast on Earth. This time, the performers that stole the show weren't human. A troupe of Unitree H1 humanoid robots danced in synchronized choreography alongside human performers, executing backflips, coordinated arm movements, and fluid walking sequences that would have been unthinkable just two years prior. By the 2026 Year of the Horse Gala, the robotics showcase had expanded dramatically - with multiple Chinese robotics companies demonstrating even more advanced humanoid capabilities on the world's biggest stage. The message was clear: China's humanoid robotics industry had arrived.
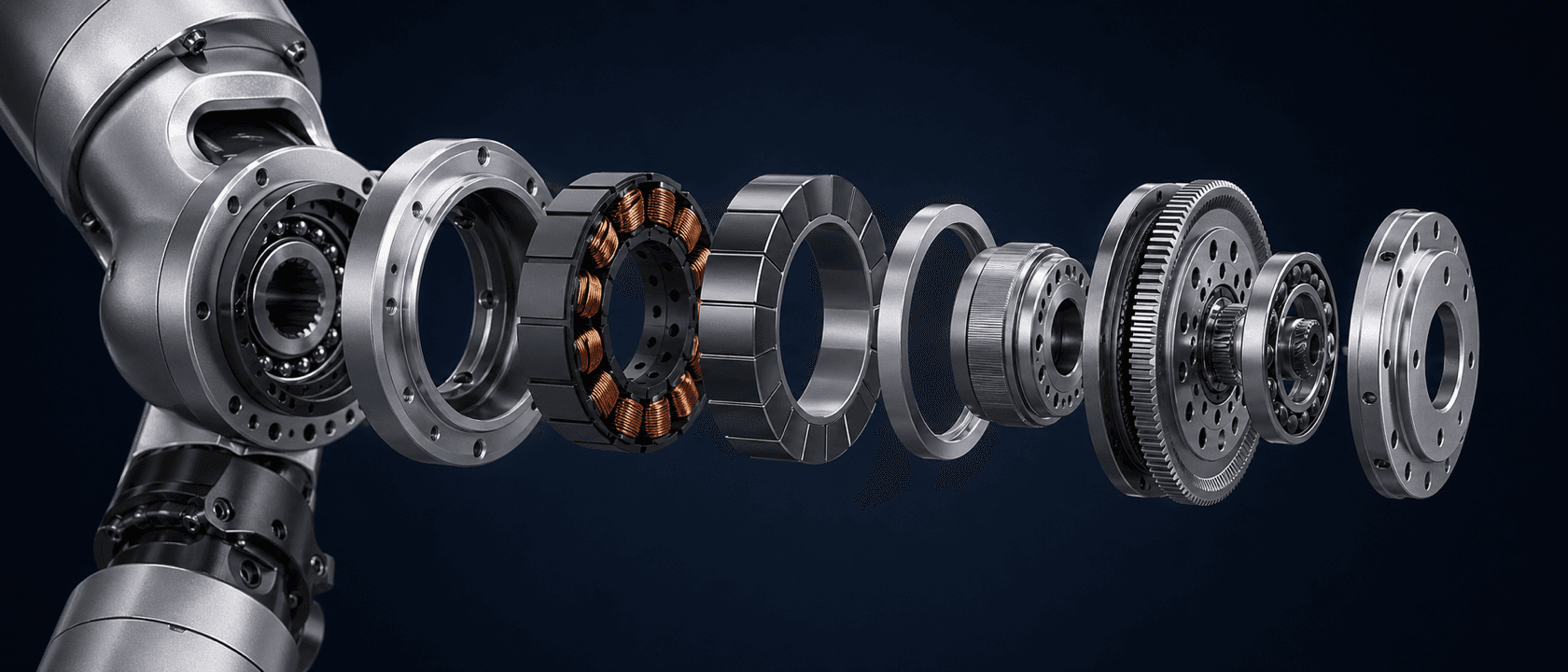
What Makes a Humanoid Robot Move?
Every fluid motion you see - a robot turning its wrist, bending a knee, or maintaining balance on one leg - is driven by a joint actuator. At the core of each actuator is a permanent magnet synchronous motor (PMSM). The Unitree H1, for example, uses custom PMSM joint motors capable of producing up to 360 N·m of peak torque at the knee, with a torque density of 189 N·m/kg. The H1-2 upgrade added 27 degrees of freedom including 7-DOF arms with 120 N·m shoulder and elbow torque. These aren't off-the-shelf motors - they use high-performance neodymium magnets specifically engineered for robotics.
- •Knee joint: 360 N·m peak torque - requires high-grade NdFeB magnets with exceptional flux density
- •Hip joint: 220 N·m - needs magnets that maintain performance under continuous load
- •Arm joints: 120 N·m - demands compact, high-energy magnets for the smaller form factor
- •Each H1 contains 10+ joint motors, each with precision magnet assemblies
Why Radial Multi-pole Ring Magnets Are the Standard
Conventional motor magnets use arc-shaped segments glued into a ring. This works for appliances and basic motors, but humanoid robots demand something better. The problem with segmented rings is mechanical imbalance, air gaps between segments, and a non-sinusoidal magnetic field that causes cogging torque - the jerky, stepped motion you feel in cheap motors. Radial multi-pole ring magnets solve this by sintering the entire ring as a single piece with curved internal grain orientation. The result is a perfectly smooth sinusoidal surface field, zero assembly gaps, and inherent mechanical balance. This is why every serious humanoid robot actuator - from Unitree's M107 motor to competing designs from Fourier, UBtech, and AgiBot - uses some form of radially oriented magnet ring.
- •10–20% higher surface flux vs segmented tile assemblies
- •Less than 1% flux variance across the ring surface
- •Sinusoidal waveform output = smoother torque, less vibration, quieter operation
- •Single-piece construction eliminates adhesive failure modes
Key Insight: The smooth sinusoidal field is what allows humanoid robots to perform delicate tasks like dancing, grasping objects, and maintaining dynamic balance. Without it, every movement would have noticeable vibration and jitter.
The Scale of Demand: From Gala Stunts to Mass Production
The Spring Festival Gala performances aren't just PR stunts - they signal industrial intent. Unitree began its IPO process in July 2025. The G1 humanoid robot launched at $16,000 for mass production. Goldman Sachs projects the humanoid robot market will reach $38 billion by 2035. Each humanoid robot contains 10–40 joint motors depending on degrees of freedom, and each motor needs precision magnet assemblies. When production scales from hundreds to thousands of units, the magnet supply chain becomes the bottleneck. This is where having a magnet supplier that specializes in radial multi-pole rings and high-precision motor magnets becomes critical.
- •Unitree G1: ~20 joint motors per unit × mass production volumes
- •Unitree H1-2: 27 DOF = 13+ high-torque motors per unit
- •Industry-wide: Fourier GR-1, UBtech Walker S, AgiBot - all need similar magnet specs
- •Projected demand: millions of precision magnet rings per year by 2028
What Grade of Magnets Do Humanoid Robots Use?
Joint motors in humanoid robots typically use N48SH and N45SH grade neodymium magnets. The 'SH' suffix is critical — it indicates super-high coercivity (HcJ ≥20 kOe) for thermal stability up to 150°C continuous. Robot motors run hard and generate heat, especially under the sustained loads of walking and carrying objects. A magnet that demagnetizes at 80°C is useless in a joint motor that reaches 100–130°C during operation. The sweet spot for most humanoid joint motors is N48SH — offering the right balance of flux density, thermal stability, and cost. See our deeper N45SH vs N48SH grade comparison for the trade-off.
- •N48SH: 45–48 MGOe energy product, stable to 150°C — the workhorse grade for humanoid robotics joint motors
- •N45SH: slightly lower BHmax, lower heavy rare earth content — the cost-down default
- •N45UH: step up to 180°C rating for high-duty knee and hip joints
- •GBD-processed magnets achieve SH/UH performance with 50–70% less heavy rare earth content, reducing both cost and supply-chain exposure
Key Insight: Mainrich's GBD (Grain Boundary Diffusion) technology allows us to produce high-temperature grades like N48SH and N50UH at near-standard cost — a significant advantage for robotics companies scaling production through the 2026 NdPr price spike.
What Has Changed Since the 2026 Gala: NdPr Prices and Export Licensing
The performance side of the humanoid robotics story made the 2026 Gala highlight reel. The supply chain side has moved just as fast in the months since. NdPr feedstock prices climbed from approximately USD 53/kg in January 2026 to roughly USD 126/kg by early April — a 2.4x move driven by structural supply deficit, EV demand growth, and uncertainty around China's MOFCOM export licensing regime. The April 2025 MOFCOM rules controlling SH and UH grade exports remain fully enforced, with the October 2025 expansion suspended only through November 10, 2026. For Chinese humanoid manufacturers, the cost pressure is real but manageable — domestic supply is plentiful. For Western buyers building on top of Chinese magnet supply (Figure, Tesla Optimus suppliers, Agility, 1X), the licensing layer adds 6–10 weeks to lead time and demands suppliers with in-house MOFCOM capability. See our deeper analysis in China rare earth export controls in 2026.
Beyond the Gala: What This Means for the Industry
The 2025 and 2026 Spring Festival Gala performances crystallized something that's been building for years: China is leading the global push toward affordable, mass-produced humanoid robots. The magnet supply chain is a foundational layer of this revolution. Companies designing humanoid robots need magnet suppliers that understand the specific requirements - tight tolerances (±0.02mm ID), flux consistency (<1% variance), sinusoidal field profiles, and the ability to scale from prototype to volume production. The companies that secure reliable magnet supply chains now will have a significant advantage as the market scales.
How Mainrich Supports the Humanoid Robotics Supply Chain
Mainrich International manufactures the full range of motor magnets used in humanoid robot joints: radial multi-pole rings, coreless (hollow cup) motor magnets, laminated assemblies for high-speed applications, and segmented ring assemblies. Our radial multi-pole rings use curved grain orientation to produce a sinusoidal surface field — the same architecture used in the leading humanoid robot platforms. We support customers from prototype through mass production with in-house GBD processing, precision grinding to ±0.02mm, and comprehensive magnetic testing. For a deeper specification walk-through, see our complete guide to magnets for humanoid robot actuators or visit our robotics applications page.
- •Radial multi-pole rings: 4, 6, 8+ pole configurations with sinusoidal output — see radial multi-pole vs arc segment comparison
- •Coreless motor magnets: ID tolerance ≤ 0.02mm, concentricity ≤ 0.02mm
- •Laminated assemblies: for high-RPM joint motors (eddy current suppression)
- •GBD processing: high-temperature grades at reduced rare earth cost
- •Full quality documentation: Br, Hcj, flux mapping, dimensional reports
- •In-house MOFCOM export licensing for SH/UH grades — no trading company intermediary
Frequently Asked Questions
What magnets are inside Unitree H1 and G1 humanoid robots?
+
Unitree has not publicly disclosed specific suppliers, but the design requirements of the H1 and G1 joint motors — sustained 100–130°C operation, high torque density, smooth low-cogging output — point to radial multi-pole sintered NdFeB rings in N45SH or N48SH grade. The H1 has roughly 10 high-torque actuated joints; the H1-2 has 27 degrees of freedom. The G1 has approximately 20 joint motors per unit. Each is built around a radial multi-pole ring assembly.
Why do Chinese humanoid robots use radial multi-pole magnet rings instead of segmented arc assemblies?
+
Torque smoothness. Radial multi-pole rings deliver 2–5% torque ripple versus 8–15% for segmented arc assemblies, because the single-piece sintered ring produces a sinusoidal surface flux distribution with no adhesive joints between segments. For human-interactive robots performing delicate motions — dancing, grasping, balancing — the lower ripple is the difference between fluid motion and visible jitter. See our radial multi-pole vs arc segment comparison for the full trade-off.
What grade of NdFeB magnet is used for humanoid robot joint motors?
+
N45SH and N48SH are the dominant grades for humanoid robot joint motors across Chinese platforms. Both are rated to 150°C continuous with HcJ ≥20 kOe, providing the thermal margin needed for sustained walking and load-bearing duty. GBD processing is effectively standard, reducing heavy rare earth content by 50–70% at equal performance. For premium platforms with higher torque demands, N45UH at 180°C rating is increasingly specified.
How many magnets does a Unitree G1 humanoid robot contain?
+
Approximately 20 joint motors per G1, each with one radial multi-pole sintered NdFeB ring as the rotor magnet, plus smaller magnets in finger and wrist actuators. Total NdFeB content per G1 is roughly 1.5–2.5 kg depending on configuration. The H1-2 with 27 degrees of freedom contains more — total NdFeB mass is typically in the 2–3 kg range for full-size humanoids.
How tight do tolerances need to be on humanoid robot motor magnet rings?
+
ID tolerance ±0.02mm, OD tolerance ±0.05mm, concentricity ≤0.02mm, perpendicularity ≤0.03mm. Air-gap sensitivity in joint motors is extreme — a 0.1mm variation in effective air gap can cause 5–10% torque output variation. Surface flux variance must stay under 1% across a production lot. 100% dimensional inspection on incoming batches is standard practice for serious production programs.
Has the April 2026 NdPr price spike affected humanoid robot magnet pricing?
+
Yes, materially. NdPr feedstock climbed from approximately USD 53/kg in January 2026 to roughly USD 126/kg by early April — a 2.4x move. For a humanoid containing 2–3 kg of NdFeB, raw material cost alone moved from approximately USD 150 per unit to USD 350 per unit. Finished magnet pricing has not moved fully in proportion (production overhead absorbs some), but Q4 2025 quotes are no longer valid for any new program. Suppliers are increasingly offering 30-day price-lock windows instead of 90.
Are humanoid robotics magnets subject to MOFCOM export licensing for shipment to the US or EU?
+
Yes, for the SH and UH grades that humanoid joint motors actually use. China's April 2025 MOFCOM Announcement No. 18 controls all NdFeB magnets containing dysprosium or terbium, which covers virtually all H, SH, UH and EH grades. Commercial robotics applications are routinely approved with proper end-use documentation; license timelines run 6–10 weeks under normal conditions. See China rare earth export controls in 2026 for the full picture.
Building a humanoid robot or high-performance servo motor? Share your motor dimensions and we'll provide a free feasibility assessment for radial multi-pole production.
Related Reading
Industry Insight
NdFeB Magnets for US Humanoid Robotics: Figure, Tesla Optimus, Agility Digit, and the 2026 Supply Chain Reality
12 min read
Industry Insight
Magnets for Collaborative Robots (Cobots): Requirements, Grades, and Supplier Selection
8 min read
Buyer's Guide
How to Choose a Neodymium Magnet Supplier for Robotics and Servo Motors
9 min read